




Sterowanie pełno krokowe i pół krokowe.
By spowodować obrót w drugą stronę trzeba tylko zamienić kolejność podawania stanów wysokich na cewki. Jak już powiedziałem wcześniej jedna zmiana stanu powoduje przesunięcie silnika o jeden pełny krok. A czy da się przesunąć silnik tylko o pół kroku ?. Oczywiście, że się da, jeśli włączymy w pewnym momencie dwie cewki na raz wirnik zatrzyma się w połowie kroku pomiędzy dwiema cewkami. Jest tylko jedna generalna zasada: nigdy nie możemy jednocześnie zasilać dwóch cewek jednej pary. My mamy połączone cewki na przemian więc musimy ustawiać w stanie wysokim sąsiednie linie portu.
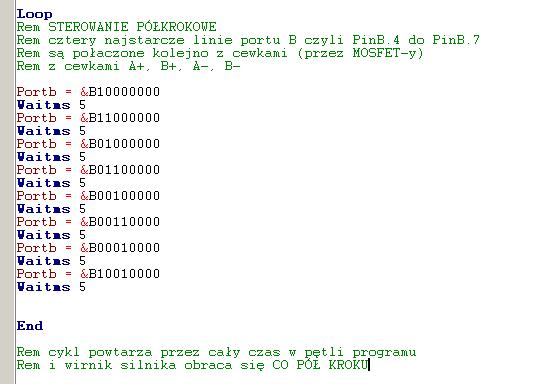
I udało nam się zwiększyć rozdzielczość silnika, teraz jedna sekwencja trwa aż 8 taktów a silnik możemy ustawić jeszcze dokładniej w konkretnej pozycji. Kolejną zaletą tego typu sterowania jest fakt, że przy małych prędkościach silnik "nie szarpie" przeskakując na kolejny krok. Na marginesie dodam tylko, że są sposoby sterowania pozwalające podzielić jeden krok silnika nawet na 8 części i zwiększyć tym samym rozdzielczość aż 8 razy.
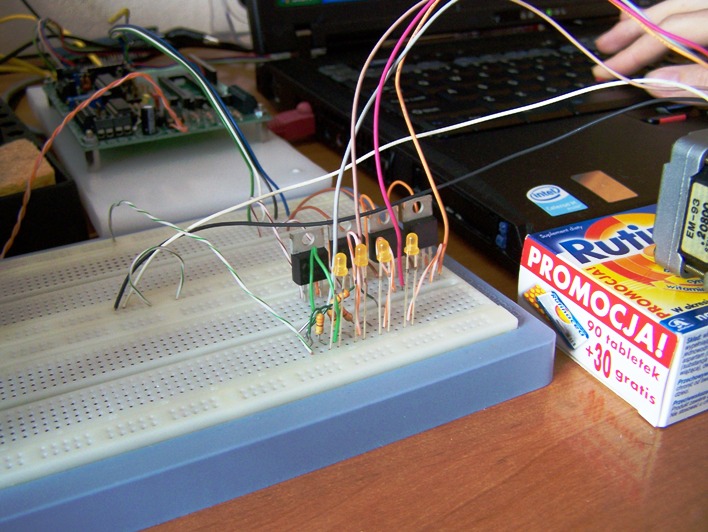
Dobrym pomysłem jest połączenie bramek tranzystorów przez rezystor ok. 320 omów z diodami LED względem masy układu. Przy małych prędkościach obrotowych widzimy dokładnie w jaki sposób włączane są cewki silnika.
Na poprzednich schematach przedstawiłem fragmenty programu ukazujące najprostszy sposób sterowania, a raczej fragment programu realizujący samo przełączanie cewek. W praktyce musimy zadbać także o wejścia mikrokontrolera na podstawie których mikrokontroler będzie obracał silnik w prawo lub w lewo, będzie go zatrzymywał na tzw. hamulcu, czy zmieniał prędkość obrotową. Program realizujący wszystkie te założenia po wielu próbach udało mi się doprowadzić do optimum. Możecie pobrać go poniżej. W jego treści zawarłem wydaje mi się dość komentarzy by go zrozumieć.
Sterownik_silnika_krokowego.bas
Teraz, gdy wszystko już działa, pora przenieść układ z płytki prototypowej na wytrawioną płytkę PCB, niestety trzeba ją wcześniej zaprojektować.
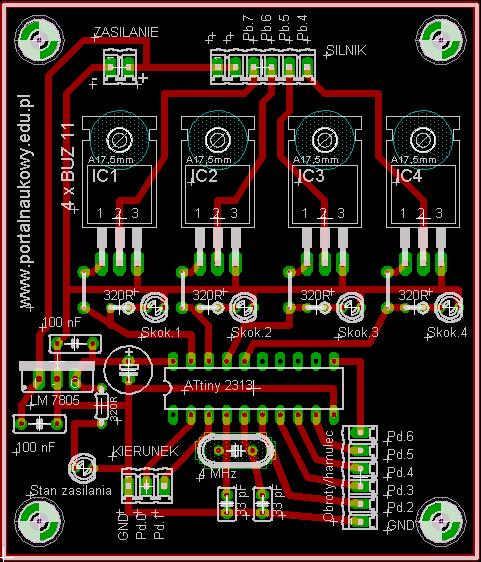
Na projekcie płytki widzicie złącze wyjściowe na silnik krokowy i dwa złącza wejściowe, których stan bada mikrokontroler (polecenia IF ... Then w programie) na podstawie tego w jakim stanie (0 czy 1)są wejścia obraca silnik w prawo lub lewo z odpowiednią prędkością. Te diody LED w tym wypadku może już nie są potrzebne ale bardzo ładnie migają więc przeniosłem je też na płytkę sterownika.
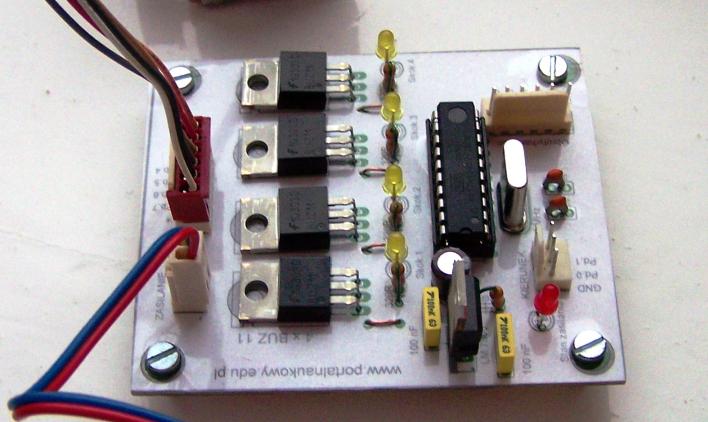
A tak wygląda gotowa, wytrawiona płytka PCB sterownika. Zrezygnowałem z lutowanych złącz tak by można było w dowolnej chwili podłączać i odłączać wszystkie przewody. Powiem szczerze, że w tej chwili nie wiem jak nazywają się te złączki ale są w praktycznie każdym sklepie elektronicznym.
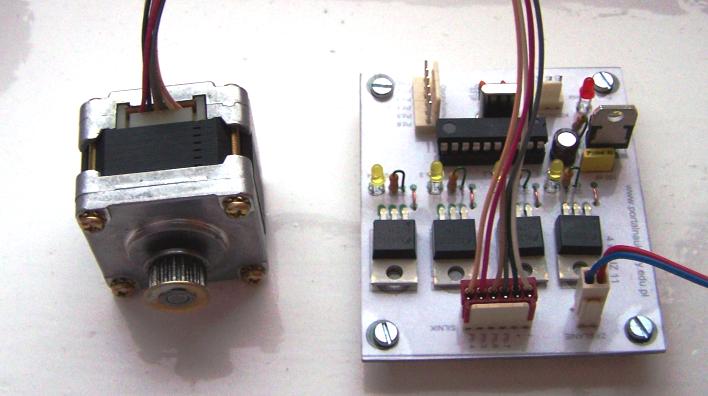
By włączyć obroty silnika w jedną ze stron wystarczy zewrzeć w złączce Kierunek odpowiedni pin do masy, by zmienić prędkość analogicznie zwieramy odpowiedni pin w złączce obroty. Dzięki takiemu rozwiązaniu sterowanie takim silnikiem jest bardzo proste. Oczywiście jeśli chcemy obracać silnik o dokładny kąt musimy zastosować całkowicie inny rodzaj sterowania ale o tym innym razem.

Po wykonaniu takiego sterownika zacząłem się zastanawiać do czego by go tu na dobry początek zastosować. Miałem w pudełku sporo różnych kółek zębatych i pasków od rozebranych drukarek itp i wpadłem na pomysł by zbudować mały samochodzik, który będę sterował takimi krokowymi silniczkami. Dodatkowo postanowiłem zastosować w nim przekładnię jak na zdjęciu powyżej. To już oczywiście przerost formy nad treścią ale będzie bardzo ładnie obrazować obroty silniczka. Zapraszam na kolejną stronę.










